Tomando un descanso de la programación de FPGAs, he decidido hacer un tutorial de microcontroladores. En esta serie abarcaré la programación de microcontroladores PIC serie 16 (16F628A y 16F877A), con el objetivo de ganar un poco de experiencia y utilizar estos conocimientos para la programación de la serie dsPIC.
Este tutorial está pensado para los que ya saben qué es un microcontrolador, y han trabajado antes en ensamblador para PIC, por lo que algunos criterios básicos se obviarán.
Pero primero:
¿Por qué trabajar en MPLABX?
Decidí programar en MPLABX por las siguientes razones:
1) El Mplab IDE antiguo, en el cual muchos de nosotros aprendimos a programar en la universidad, fue actualizado, así que solo se consigue en la página de descargas en el archivo de microchip, por lo que tenemos que actualizarnos nosotros también. Esto en verdad es una pena, pues he encontrado muy difícil acostumbrarme al nuevo entorno de desarrollo MplabX, aún encuentro confuso la configuración requerida para programar en ensamblador y cuestiones similares, pero, para esto es la guía, para en el transcurso de la misma familiarizarnos con esta nueva herramienta.
2) Siempre es recomendable programar en los entornos de desarrollo de los fabricantes. Esto pues aunque existan plataformas como Pinguino, Chipkit o Arduino, si tu objetivo es aprender a programar un microcontrolador, es mejor hacerlo en el lenguaje y/o la plataforma que el fabricante nos recomienda.
¿Por qué XC8?
Pues bien, no hay otra opción. Cuando Microchip lanzó las primeras versiones de MplabX, ésta utilizaba los compiladores C18 y C30 para la programación en C. La versión más reciente (2.15) trabaja con XC8, XC16 y XC32, así que no nos queda más que aprender a utilizar las nuevas herramientas.
Por eso también me tocó aprender el XC8, es una pena que se cambie tan rápido (en menos de 2 años) las herramientas de desarrollo, pero ¿qué más podemos hacer?
¿Por qué la familia PIC16?
Pues es la más fácil de aprender, y además estos microcontroladores son los que se pueden conseguir en Cuenca-Ecuador. Si quieres que haga un tutorial sobre otro microcontrolador, pues sus regalos serán bienvenidos ;-).
Objetivo de estos tutoriales:
Utilizar las herramientas de Microchip para proyectos de baja complejidad, es decir, a los proyectos en los cuales no se requiera exactitud en tiempos, altas velocidades, etc. Esto pues si queremos que un retardo dure exactamente un segundo, ni un microsegundo más, requeriremos realizar la programación en ensamblador, y no en C como se tiene planificado. Pero no te desanimes, se toparán temas complejos como la utilización de LCDs gráficos a colores, memorias SD, etc. Siempre teniendo en cuenta el funcionamiento real del microcontrolador. ¿A qué quiero llegar con esto?, pues bien, si tu objetivo es meramente utilizar un módulo GPS, GSM, USB, GLCD o similar, sin saber a fondo cómo envía los datos el micro, pues este tutorial no es para ti. Para eso se utiliza Arduino o Pinguino ( los cuales abarcaremos en otra oportunidad).
Primer paso: descargar e instalar MPLabX y XC8
Para programar un microcontrolador de Microchip debemos descargar el entorno de desarrollo MPLabX, pero el mismo no nos permite realizar la programación en C de manera inmediata, para esto tenemos que descargar el compilador XC8.
Primero instalamos MPLabX, y luego el compilador XC8. Una vez hecho iniciamos el programa y veremos la siguiente pantalla:

Segundo paso: Crear un nuevo proyecto
Hacemos click en File>New Project, y seleccionamos Standalone Project.

En la siguiente pantalla seleccionamos el microcontrolador que queremos utilizar, en nuestro caso será el PIC16F628A

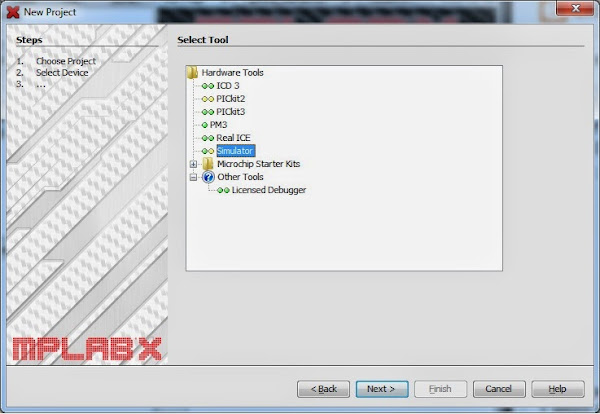
A continuación nos pedirá el tipo de conexión para el debugger, para el cual seleccionamos "None" y damos click en siguiente. Después no pedirá la herramienta de depuración a utilizar, para la cual seleccionamos "Simulador" (esto puede ser diferente si tienes un programador que pueda realizar depuración).
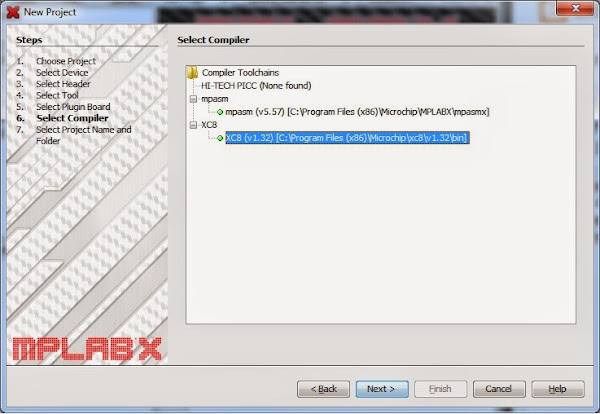
Luego seleccionamos el compilador, en nuestro caso será el XC8 V1.32:
Y por último le damos un nombre al proyecto (holamundo):
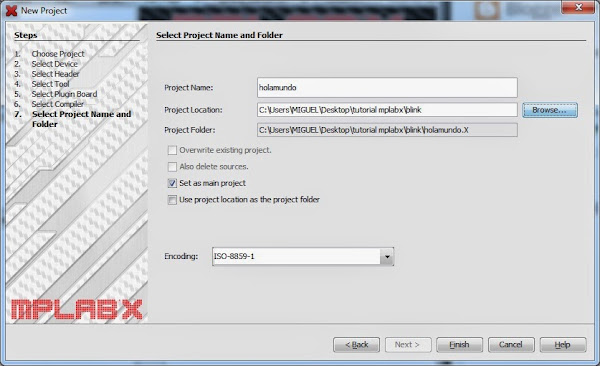
Hacemos click en Finalizar, y se creará el directorio base para nuestro proyecto, el cual se muestra en la figura.

Como podemos observar se crean subcarpetas en el proyecto destinadas a contener los archivos de cabecera (headers .h), los archivos de fuente (source .c), librerías y demás. Esta es una de las características de MPLABX que en realidad me gusta, pues nos permite ordenar nuestro proyecto de una manera bastante sencilla.
Tercer paso: Programación de "hola mundo"
Para todos los que nos gusta la electrónica, sabemos que el equivalente al "hola mundo" en programación, es encender un LED, específicamente hacerlo encender y apagar en un periodo de tiempo. Para esto debemos seguir los siguientes pasos:
1) Crear un archivo de encabezado con los bits de configuración del microcontrolador
Para esto hacemos click derecho en Header Files>New>C Header File.

Luego creamos el archivo de encabezado en la dirección del proyecto

Borramos el contenido por defecto que crea MPLABX en el archivo de encabezado para cargar nuestro propio código. En este archivo ingresaremos los bits de configuración del microcontrolador, es decir, las directivas para programación en alto o bajo voltaje, la configuración del oscilador, etc. Para esto existe una herramienta que nos permite generar el código requerido, la cual se encuentra en Window>PIC Memory Views>Configuration Bits

En esta herramienta seleccionaremos los siguientes bits de configuración:
Oscilador: Interno sin clockout
Watchdog Timer: desactivado
Power-Up Timer: desactivado
MCLRE: desactivado
Brown-out detect: activado
LVP: desactivado
Data protection: desactivado
Code protection: desactivado

Hacemos click en "Generate Source Code to Output", copiamos y pegamos el código generado en al archivo hmheader.h:

2) Crear un archivo fuente con el código del programa
Una vez creado el encabezado, podemos crear el código fuente de la aplicación, para lo cual hacemos click derecho en Source Files>New>C Main File

Le damos un nombre al archivo e ingresamos el código fuente del mismo. Dicho código es el siguiente:
Se incluye el encabezado: #include "hmheader.h" para cargar los bits de configuración
Se define la velocidad del cristal 4000000Hz. Aunque no utilizamos un cristal externo, se debe declarar la velocidad del cristar interno del microcontrolador para que las rutinas de retardo funcionen adecuadamente.
Se crea una subrutina de inicialización: void initPorts (void), en la cual definimos al puerto B como salida (TRISB=0b00000000) y lo inicializamos con todos los bits apagados (PORTB=0).
En el bucle principal se llama a la subrutina para inicializar puertos, y se coloca el código para encender y apagar los bits del puerto B (PORTB=0b11111111). Se utiliza un retardo (_delay(1000000)) de un millón de pulsos de reloj, lo cual nos equivale a 1 segundo de retardo con el oscilador interno de 4MHz. Esto se debe tener en cuenta, pues si utilizamos un oscilador de 20 MHZ, un retardo de 1 millón de pulsos de reloj nos equivale a 200ms.El tiempo de retardo se calcula de la siguiente manera:
Tiempo de retardo=[1/(Frecuencia del cristal/4)] x Valor de pulsos en el retardo
Para el ejemplo (Cristal interno de 4MHz):
Tiempo de retardo=[1/(4M/4)] x 1M=1 segundo
Por lo que el tiempo del cristal dicta la duración de los retardos.
Cuarto paso: Simulación en MPLABX
Para entender el por qué de mi afirmación que la programación en C es para proyectos simples que no demandan una exactitud elevada en retardos, se realizará la simulación del programa y se observará la diferencia de tiempos. Para esto compilamos el proyecto, y si no hay errores, hacemos click en la opción de depuración.
{kind=link}
Creamos 2 Breakpoints para detener la simulación. Si no hacemos esto, la simulación se realizará muy rápidamente y no podremos ver los cambios de registros, variables o contar el tiempo entre instrucciones.

Iniciamos la simulación, con lo que la misma se detendrá en el primer Breakpoint. Hacemos click en "StopWatch" en la parte inferior de la pantalla, y reiniciamos el cronómetro.
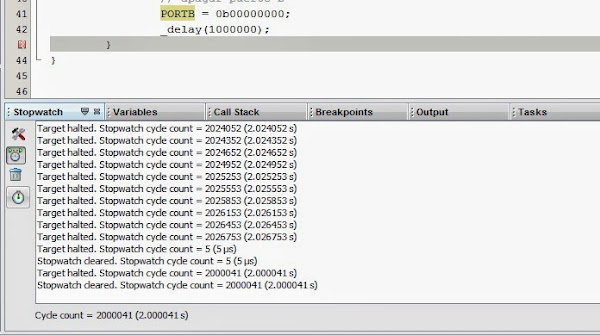
Volvemos a iniciar la simulación, y veremos que el lo que debía haber durado 2 segundos, en realidad duró 2.000033 segundos.

Pues bien, este resultado no es una sorpresa para los que ya han programado en ensamblador, pues los retardos se calculan en función del número de ciclos que toma cada directiva del código, y el tiempo de ciclo del reloj, pero es algo que quería recalcar pues muchos estudiantes o aficionados inician su aprendizaje en MPLABX y desconocen que si en el código le digo al micro que se demore 1 segundo en una actividad, esto puede no ser siempre cierto, por lo tanto, si queremos tiempos exactos debemos utilizar ensamblador y no C.
Quinto Paso: Simulación en Proteus
Aunque Proteus no es software libre, no he encontrado otra opción similar de código abierto, por lo que las simulaciones las haré en este software. Proteus es un software de pago, por lo que conseguirlo corre por tu cuenta.
Una vez iniciado el programa agregamos el microcontrolador utilizado.

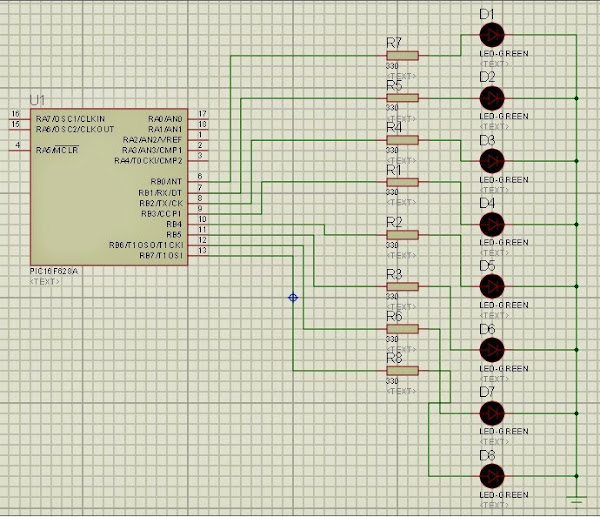
Dibujamos el circuito para encender y apagar 8 leds, como se muestra en la figura
Por último, haciendo doble click sobre el micro, cambiamos la velocidad del oscilador, y cargamos el archivo .hex de la carpeta "dist>default>production" del proyecto.

Con esto podremos simular adecuadamente el programa, y cargarlo al microcontrolador con cualquier programador.

Es todo por hoy, cualquier pregunta al respecto estaré gustoso de ayudarles. Hasta una próxima entrega, adiós.
Fuente: este post proviene de Blog de davilamds, donde puedes consultar el contenido original.
¿Vulnera este post tus derechos? Pincha aquí.
Creado: